在線
客服
在線客服服務時間:9:00-19:00
QQ客服:
旺旺客服:
客服
熱線
18623896844
13264445812
18612707474
7*14小時客服服務熱線
添加
微信
 風清揚官方微信
風清揚官方微信
打賞
站長
 感恩支持
感恩支持
開發在廣范圍實現三維距離計測的3D LiDAR
【提 要】?
??????? 松下電器產業株式會社 汽車電子和機電系統公司開發出了三維距離傳感器3D LiDAR[1],它能夠正確計測直至周圍物體的距離和方向。本開發品通過采用獨立結構的激光掃描技術,實現了垂直方向60度、水平方向270度的廣角掃描。通過擴大距離計測空間,為自律移動機器人[2]的穩定行駛做出貢獻。

【效 果】
??????? 本開發品垂直方向的計測范圍特別廣,在應用于自律移動機器人時,可正確檢測路面上的障礙物和路面的凹凸狀態。此外,由于可改變掃描范圍和分辨率,因而可實現適合于利用場景的計測,為加速在人往來的設施內和戶外行駛的自律移動機器人的普及做出貢獻。
【特 點】
本開發品應用采用獨立結構的激光掃描技術,具有以下特點。
?1. 實現廣范圍的三維距離計測(垂直方向60度、水平方向270度)
?2. 可進行垂直方向的掃描范圍、分辨率的任意設定
?3. 即使在日照環境下也可進行高精度計測
【過去示例】
??????? 要使得機器人在人往來的設施內和戶外自律移動,不僅需要把握機器人的前方、左右方向,而且還需要把握路面狀況。車載用途中使用的3D LiDAR,由于激光的垂直掃描范圍不足,依靠單一傳感器未能正確把握路面狀況,結果需要與其他傳感器進行組合。因此,曾面臨行駛控制系統的構成復雜的課題。
【用 途】
自律移動機器人(自動搬運機、送貨機器人等)、叉車、農業機械、建筑機械、安防系統
【實用化】
?樣品出貨預定:2018年1月
【備 注】
本產品將于2017年10月3日~10月6日在幕張國際展覽館舉辦的“CEATEC JAPAN 2017”上展出。
【商品咨詢】
オートモーティブ&インダストリアルシステムズ社 インダストリアル事業開発センター
e-mail: lidar3d_info@ml.jp.panasonic.com
【商品的詳細信息】
https://industrial.panasonic.com/ww/products-rd/3dlidar?ad=press20170911C
【特點的說明】
1.?實現廣范圍的三維距離計測(垂直方向60度、水平方向270度)
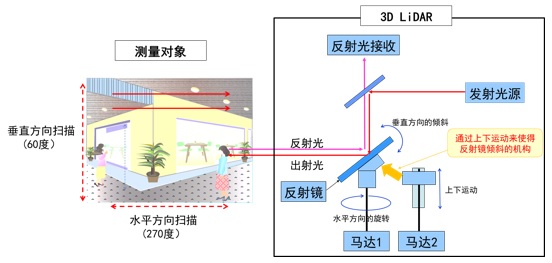
??????? 車載用途中使用的3D LiDAR,對于希望檢測廣范圍以及路面狀況的工業用途中提出的要求,未能通過單一傳感器來應對。本公司通過有效利用在光盤驅動器事業中培植起來的光學設計技術和馬達控制技術,開發出了采用獨立結構的激光掃描技術,通過單一光源實現了垂直方向60度、水平方向270度的廣角掃描。由此,可借助于單一傳感器來進行廣范圍的三維距離計測,無需與其他傳感器進行組合,可簡化自律移動機器人的行駛控制系統的構成。
<本公司激光掃描技術 概要圖>
2.?可進行垂直方向的掃描范圍、分辨率的任意設定
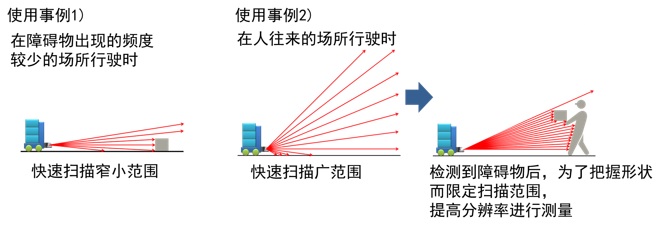
??????? 自律移動機器人上,根據行駛場所和時間等環境,障礙物檢測所需的范圍會發生變化。譬如,在路面沒有凹凸,障礙物出現的頻度少的場所行駛時,要求做到無需詳細檢測路面狀況,根據機器人的行駛速度快速地對窄小范圍進行掃描。一方面,在人往來的場所行駛時,要求把握從路面直至相當于機器人高度的廣范圍的狀況。進而,在檢測到障礙物時,有時還需要把握障礙物的詳細形狀。本開發品通過采用獨立結構的激光掃描技術,可以從多種模式中設定垂直方向的掃描范圍和分辨率。由此,可通過適合于利用場景的掃描范圍和分辨率來進行距離計測,實現機器人穩定且有效的行駛。
<使用事例>
3.?即使在日照環境下也可進行高精度計測
??????? 在戶外使用機器人時,要求即使在日照環境下也能夠使用。本開發品通過將發射激光和遇到物體反射光的路徑設計在同一個光學路徑上的技術手段減輕太陽光引發的噪聲,即使在相當于盛夏烈日高照的100,000勒克斯[3]的照度下也可進行高精度的計測。
<日照環境下的測量結果>
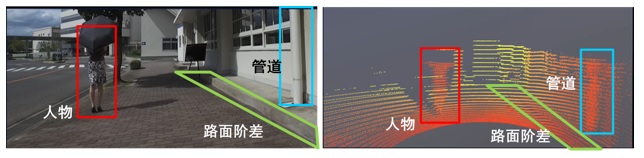
(左:攝影機圖像、右:本公司3D LiDAR計測結果)
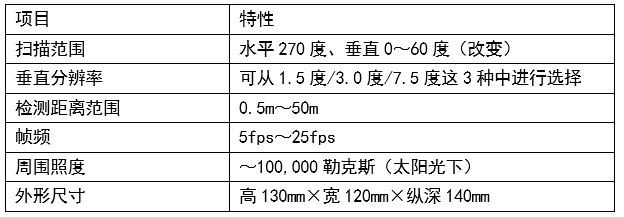
【開發品的規格】
【術語說明】
[1] LiDAR (Light Detection and Ranging)
根據照射出的激光碰到對象物,反射的光返回為止的時間來計測距離的傳感器。
[2] 自律移動機器人
基于從相機,GPS,測距傳感器等各種設備得到的圖像及位置信息達到追蹤路徑,避開障礙物的同時,移動到事先決定的目的地的自律行走型機器人.在自動搬運以及送貨到戶等不斷擴大的市場應用上被期待
[3] 勒克斯
從光源發出的激光,照射到物體時的明亮程度的定量化采用的,所謂的照度的基本單位